Mục tiêu
Áp dụng các khối lệnh trong nhóm Sensing để lập trình cho nhân vật vượt chướng ngại vật trên đường đi.
Bài 1
Tải 2 nhân vật tại đây: bong1, vatcan1 (nếu nhấn vào liên kết mà không tải được tệp tin về, các em có thể click chuột phải lên liên kết → chọn Save link as...)
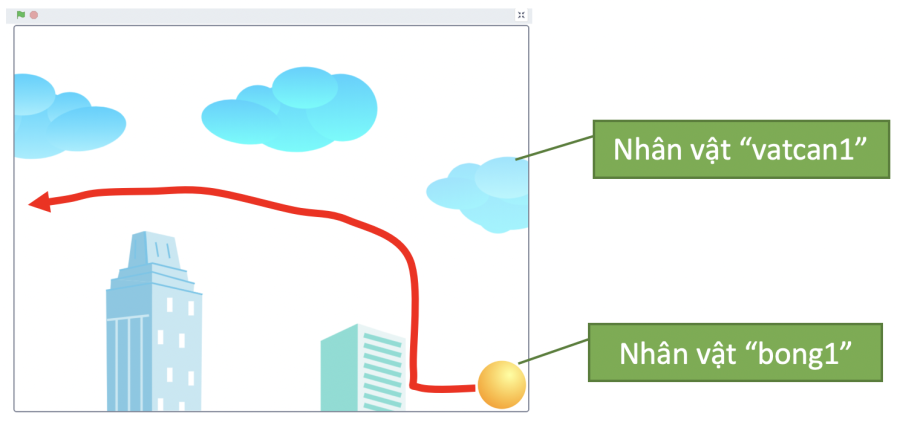
Chuẩn bị: Xóa nhân vật mèo, thêm 2 nhân vật đã tải vào dự án và định vị cho 2 nhân vật tại vị trí như hình
Lập trình:
- Khi bắt đầu chạy chương trình: Nhân vật “bong1” định vị tại tọa độ như hình 1
- Khi nhấn vào nhân vật “bong1”:
- Sử dụng phím số 3 để di chuyển nhân vật “bong1” đi theo phương ngang
- Sử dụng phím số 2 để di chuyển nhân vật “bong1” đi theo phương dọc
- Không nhấn bất kì phím nào nhân vật sẽ rơi tự do (rơi tự do xuống dưới)
- Nếu chạm nhân vật “vatcan1” sẽ quay lại điểm xuất phát
Bài 2
Tải 2 nhân vật tại đây: bong2, vatcan2 (nếu nhấn vào liên kết mà không tải được tệp tin về, các em có thể click chuột phải lên liên kết → chọn Save link as...)
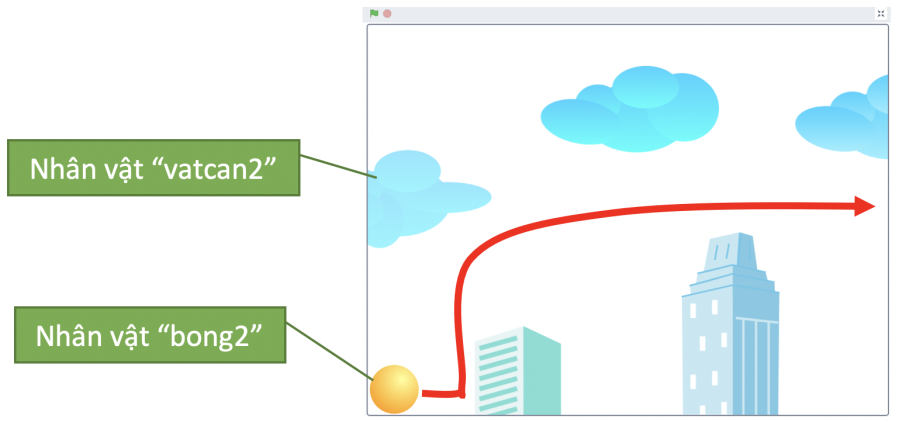
Chuẩn bị: Xóa nhân vật mèo, thêm 2 nhân vật đã tải vào dự án và định vị cho 2 nhân vật tại vị trí như hình
Lập trình:
- Khi bắt đầu chạy chương trình: Nhân vật “bong2” định vị tại tọa độ như hình 2
- Khi nhấn vào nhân vật “bong2”:
- Sử dụng phím số 2 để di chuyển nhân vật “bong2” đi theo phương ngang
- Sử dụng phím số 1 để di chuyển nhân vật “bong2” đi theo phương dọc
- Không nhấn bất kì phím nào nhân vật sẽ rơi tự do (rơi tự do xuống dưới)
- Nếu chạm nhân vật “vatcan2” sẽ quay lại điểm xuất phát